From the Series

Professors Edgar Lobaton & Alper Bozkurt of North Carolina State University are harnessing the frenetic nature of flying cockroaches to help map out hazardous or hard-to-reach areas. They have developed a combination of hardware and software that draws virtual images of disaster-stricken places, like a building that is in danger of collapsing.
"The idea would be to release a swarm of sensor-equipped biobots into a collapsed building or other dangerous, unmapped area," said Lobaton.
Sending rescuers into a space that is structurally unsound (like a building that has sustained fire damage) puts them in as much danger as trapped survivors. For this reason, researchers have been exploring alternatives that keep humans safe. The insect-like miniature sensors perform reconnaissance to map out the treacherous space completely before rescuers can be sent in.
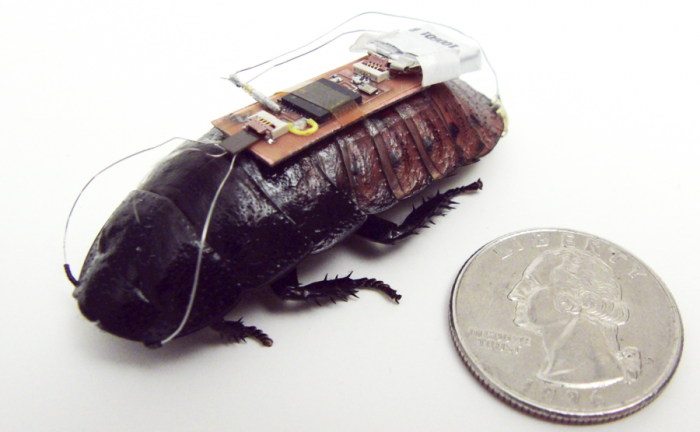
Previously, Professor Bozkurt developed functional cockroach biobots (pictured above) as a first step to realise the design concept and now the accompanying software and radio technology allows researchers to test the project in practical scenarios.
The tiny biobots (or UAVs – unmanned aerial vehicles) fly around the unfamiliar area and draw a reliable yet rudimentary virtual image of the space for first responders to use as a strategic model. The biobots work in contrast to a drone that is controlled remotely by a human, being guided instead by a mobile UAV beacon.
"Using remote-control technology, we would restrict the movement of the biobots to a defined area. That area would be defined by proximity to a beacon on a UAV. For example, the biobots may be prevented from going more than 20 metres from the UAV," Lobaton said.
These insect-cyborgs swarm around a radio beacon that sets a parameter for them to stay in. Once one section of the unknown space has been mapped out adequately by the flying sensors, the beacon can be moved to a new section of the space and the process is repeated. The resulting images are then stitched together by the new software of Professor Lobaton and his colleagues, forming the map that will help emergency authorities.
"A strong radio signal from the UAV could penetrate to a certain extent into a collapsed building [where conventional GPS fails], keeping the biobot swarm contained. And as long as we can get a signal from any part of the swarm, we are able to retrieve data on what the rest of the swarm is doing. Based on our experimental data, we know you're going to lose track of a few individuals, but that shouldn't prevent you from collecting enough data for mapping," Lobaton said.
The video below shows the simulation results of the project's UAV swarm-sensor system in action.





