For years, the chief space explorer has been the Mars rover in its various iterations. Now, scientists and engineers at NASA have designed an agile companion to sneak into the areas the rover can’t reach. Inspired by the ancient Japanese art of origami, the Pop-Up Flat Folding Explorer Robot (PUFFER) is able to flatten itself, tuck in its wheels and crawl into areas that might be too risky for a full-fledged rover to go, such as steep slopes or behind sand dunes.
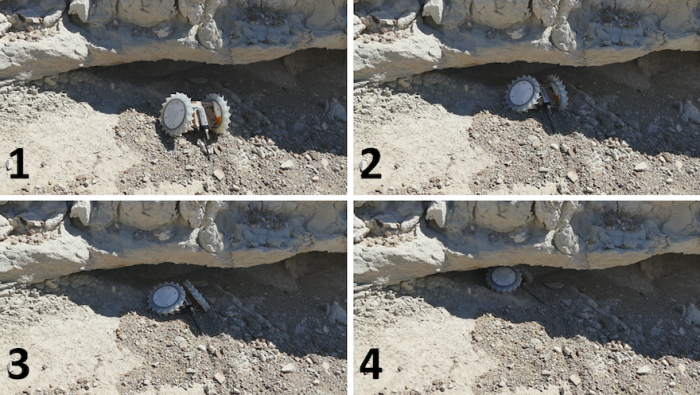
Jaakko Karras, PUFFER’s project manager, developed the prototype of the device’s body while experimenting with origami designs for a robotics project based on forms commonly found in nature. Releasing they were onto something, Karras’ team substituted the paper with a printed circuit board, opening the door to more electronic features. Its two wheels were 3D-printed and its treads allow it to climb inclines. Its wheels fold over its main body, allowing it to crawl.
According to a NASA press release, the folding bot will become a scientist in the next phase of development. The team plans to add a number of instruments that would allow it to sample water for organic material, or a spectrometer to study the chemical makeup of its environment. "Small robotic explorers like PUFFER could change the way we do science on Mars," Karras said. "Like Sojourner before it, we think it's an exciting advance in robotic design."